Mapping and Object Detection by Whisker Sensor
- Skills: Mapping, C++, Object_detection, ROS
Motivation
A robot with a whisker sensor could one day play an important role in dark or other extreme environments where other sensors like cameras might not work. The whisker robot can measure environments using direct physical contact, completing difficult tasks even in the dark.
Introduction
This projects builds a map by using whisker sensors to detect the environment. It is using Whisker Physics Simulator to build an environment and simulate whiskers detecting objects in that environment. Then, I transfer whisker sensor data to 2D scan data. After that, I use those data to implement slam with slam_toolbox.
Whisker simulation world
As shown on Figure 2, the simulation world contains 5 cylinders. I controlled the rat by sending it linear and angular velocities, and trigerring the whisker to move back and forth So the rat whisker can scan the environment, and output the whisker sensor data.
Whisker Sensor Data
The whisker is simulated by moving it back and forth. Each whisker contains 20 segments, which can sense the whisker dynamics in force and moment when they touch with objects. Also whiskers can give feedback of which segment has collision with objects. Then they calculate the next whisker’s motion path based on its force and moment. Also calculate current kinematics value in x, y and theta.
After I get each segments kinematics data, I need to match each segments collision data with its kinematics data. After that, I am ready to estimate objects position.
Transfer whisker data to 2D scan data
Whisker data are in 3D points. I need to transfer it to 2D laser-scan data, and use that data build a map. It order to do it, I transfer 3D points to 2D points by eliminate z axis value. Next I transfer 2D data to 2D laser-scan data by setting up scan_angle, angle_increasement, scan_time, range_distance.
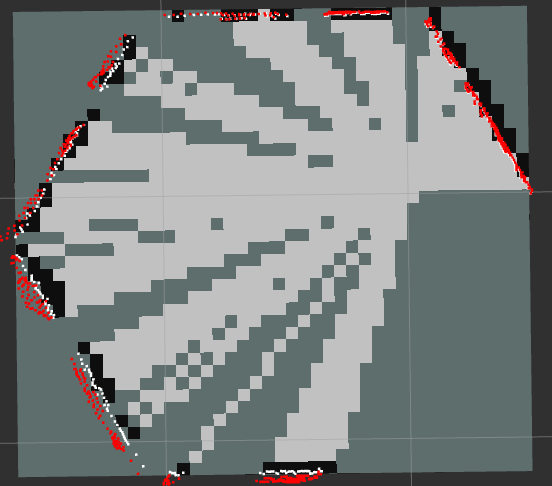
Map building
After I convert 3D whisker data to 2D scan data, I implement slam with slam_toolbox to locate all obstacles in 2D map.
Future scope
- Implement whisker mapping method into whisker robot in real world.
- Implement with other object detection algorithm like circular detection algorithm.